Pipeline Overview
Many robotic tasks are unforgiving; a single mistake in a dynamic throw can lead to unacceptable delays or unrecoverable failure. To mitigate this, we present a novel approach that leverages learned simulation priors to inform goal-conditioned dynamic manipulation of ropes for efficient and accurate task execution.
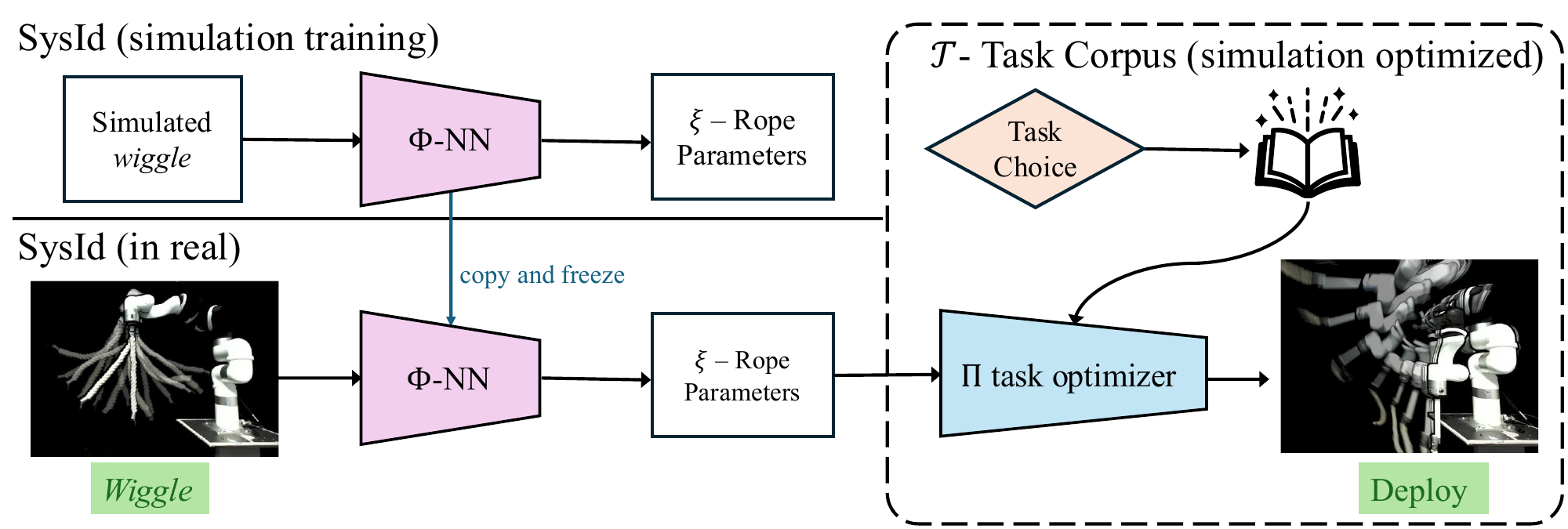
Related methods for dynamic rope manipulation either require large real-world datasets to estimate rope behavior or the use of iterative improvements on attempts at the task for goal completion. We introduce Wiggle and Go!, a system-identification, two-stage framework that enables zero-shot task rope manipulation. The framework consists of a system identification module that observes rope movement to predict descriptive physical parameters, which then informs an optimization method for goal-conditioned action prediction for the robot to execute zero-shot in the real.
Our method achieves strong performance across multiple dynamic manipulation tasks enabled by the same task-agnostic system identification module which offers seamless switching between different manipulation tasks, allowing a single model to support a diverse array of manipulation policies. We achieve a 3.55 cm average accuracy on 3D target striking in real using rope system parameters in comparison to 15.34 cm accuracy when our task model is not system-parameter-informed. We achieve a Pearson correlation coefficient of 0.95 between Fourier frequencies of the predicted and real ropes on an unseen trajectory.
This section shows the stacked videos of the varying rope parameters performed with the same wiggle motion. It helps us develop intuition about the rope behavior and how it changes with different parameters.
This work used computational resources at Pittsburgh Supercomputing Center through allocation CIS251423 from the Advanced Cyberinfrastructure Coordination Ecosystem: Services & Support (ACCESS) program, which is supported by U.S. National Science Foundation grants #2138259, #2138286, #2138307, #2137603, and #2138296.
We also thank Professor Chris Atkeson for his advice on the paper and Alan Wang for his early work on this project.
I am a masters student in Robotics at Carnegie Mellon University. My fields of interest include: robot learning, manipulation and active perception. I am looking to pursue a PhD in Robotics and Machine Learning. If you have collaboration opportunities or any question about my work, please contact me at ajakobss+wag@cmu.edu.
@article{jakobsson2025wag,
author = {Jakobsson, Arthur and Mahajan, Abhinav and Pullalarevu, Karthik and Suresh, Krishna and Yao, Yunchao and Mao, Yuemin and Duisterhof, Bardienus and Syed, Shahram and Ichnowski, Jeffrey},
title = {Wiggle and Go! System Identification for Zero-Shot Dynamic Rope Manipulation},
journal = {},
year = {2025},
}